
Faculty of Mechanical Engineering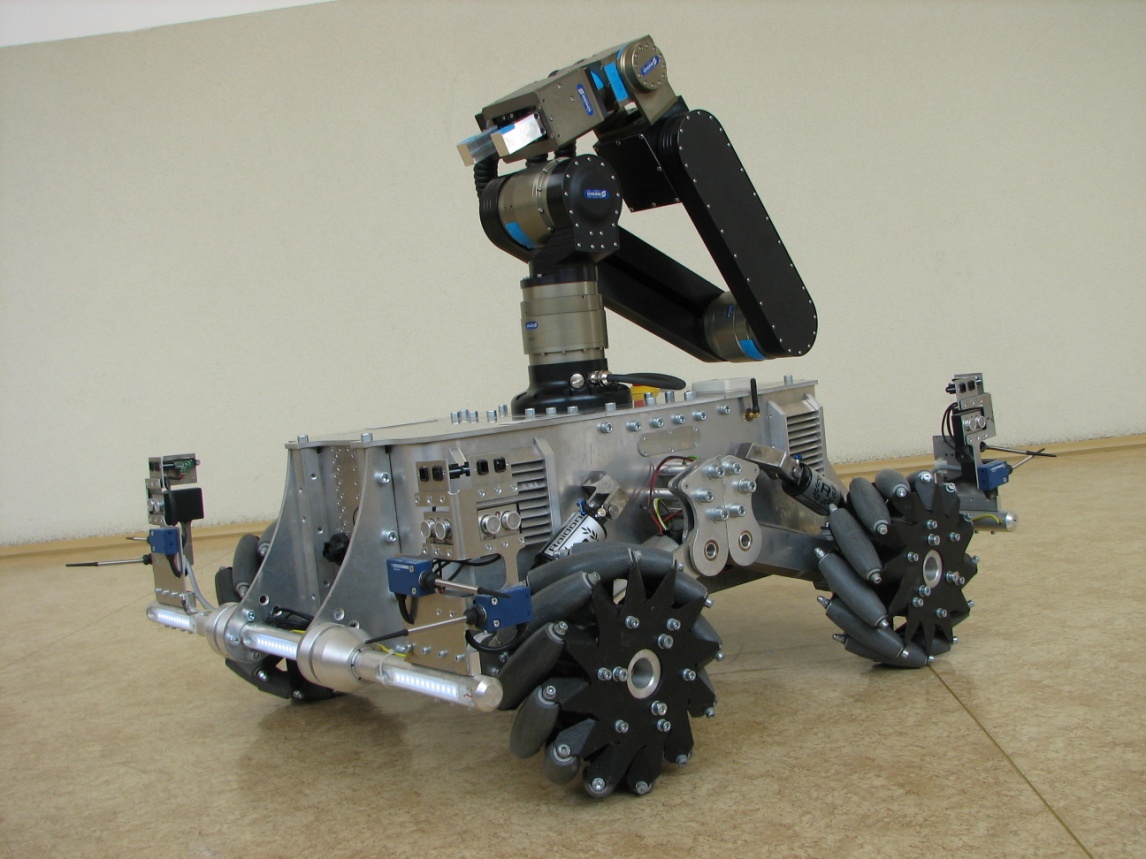
Department/Institute: Institute of Automation, Measurement and Applied Informatics
Contact person: Prof.Ing. Boris Rohaľ-Ilkiv, CSc.,
Contact: +421 908 109 345
e-mail: boris.rohal-ilkiv@stuba.sk
Description:
The laboratory along with its equipment is focused at the field of development and experimental validation of modern control, modeling and system identification methods for mechatronic and robotic systems. It is mainly oriented towards the design of algorithmic support of adaptive and predictive control systems with joint state and parameter estimation. The research of state-of-the-art control algorithms enabling the use of process constraints such as limits on inputs, outputs and states is also in the focus of the laboratory. The laboratory itself is a collection of research and demonstration systems consisting of personal computers equipped with laboratory measurement cards, signal processing devices and the physical experimental device; which from the viewpoint of its dynamic properties is the equivalent of the modeled real-life system. The laboratory includes experimental systems such as an autonomic mobile robotic system, rotational and linear pendulums, a pendubot, devices for active vibration and acoustic control, a model of an intelligent building and others. These workstations enable the experimental validation of stability, convergence and robustness of various algorithms in real time and on embedded systems.
Projects:
- „Adaptive and predictive control with physical constraints“. Projekt EU No. CP941174 PREDCON in the framework COPERNICUS Programme. Principal investigator, period of solution 1995-1998.
- „Stable model based predictive control for constrained systems and processes“. Projekt of British-Slovak joint research collaboration programme between STU and Oxford Universit supported by British Council. Brit5/Slov. No.7995. Principal investigator, period of solution 1999-2002.
- „Predictive control of mechatronic systems with fast dynamics and constraints“ APVV project No: APVV-0280-06. Principal investigator, period of solution 2007-2009.
- „Efficient predictive control of nonlinear mechatronic systems“ APVV project No: LPP-0096-07. Principal investigator, period of solution 2008-2011.
- „Model predictive control and joint state and parameter estimation methods for fast nonlinear mechatronic systems“ APVV project No: APVV-0090-10. Principal investigator, period of solution 2011-2014.
- "Training in Embedded Predictive Control and Optimization" Project FP7-PEOPLE-2013-ITN. No. 607957. Investigator, period of solution 2014-2017.
Publications:
- Polóni, Tomáš - Rohaľ-Ilkiv, Boris - Johansen, T.A.: Mass flow estimation with model bias correction for a turbo charged Diesel engine. In: Control Engineering Practice. - ISSN: 0967-0661. - Vol. 23, pp. 22-31 (2014)
- Polóni, Tomáš - Eielsen, A.A. - Rohaľ-Ilkiv, Boris - Johansen, T.A.: Adaptive Model Estimation of Vibration Motion for a Nanopositioner with Moving Horizon Optimized Extended Kalman Filter. In: Journal of Dynamic Systems Measurement and Control-Transactions of the ASME. - ISSN 0022-0434. - Vol. 135, No. 4 (2013)
- Takács, Gergely - Rohaľ-Ilkiv, Boris: Model Predictive Vibration Control : Efficient Constrained MPC Vibration Control for Lightly Damped Mechanical Structures. - 1st. ed. - London : Springer Verlag London, 2012. - 512 s. - ISBN 978-1-4471-2332-3
- Polóni, Tomáš - Rohaľ-Ilkiv, Boris - Alberer, Daniel - del Re, Luigi - Johansen, T.A.: Comparison of sensor configurations for mass flow estimation of turbocharged diesel engines. In: Lecture Notes in Control and Information Sciences. - ISSN 0170-8643. - Vol. 418: Identification for automotive systems. - London : Springer Verlag London, 2012. - ISBN 978-1-4471-2220-3, p. 303-326
- Polóni, Tomáš - Johansen, T.A. - Rohaľ-Ilkiv, Boris: Modeling of Air-Fuel Ratio Dynamics of Gasoline Combustion Engine with ARX Network. In: Journal of Dynamic Systems Measurement and Control-Transactions of the ASME. - ISSN 0022-0434. - Vol. 130, No. 6 (2008), s. 061009/1-061009/10
- Kouvaritakis, B. - Cannon, M. - Karas, Adrián - Rohaľ-Ilkiv, Boris - Belavý, Cyril: Asymmetric constraints with polytopic sets in MPC with application to coupled tanks system. In: International Journal of Robust and Nonlinear Control. - ISSN 1049-8923. - Vol. 14 (2004), s. 341-353
- Kouvaritakis, B. - Cannon, M. - Rohaľ-Ilkiv, Boris - Karas, Adrián - Belavý, Cyril: Constrained predictive control of linear distributed parameter systems. In: International Journal of Control. - ISSN 0020-7179. - Vol. 77 (2004), No. 10, s.941-948
- Rohaľ-Ilkiv, Boris: A note calculation of polytopic-invariant feasible sets for linear continuous-time systems. In: Annual Reviews in Control. - ISSN 1367-5788. - Vol. 28 (2004), s. 59-64
- Rohaľ-Ilkiv, Boris: Continuous - Time Predictive Control: Spline Based Approach. - 1. vyd. - Bratislava : STU v Bratislave, 2003. - 122 s. - ISBN 80-227-1872-6
- Roháľová Ilkivová, Martina - Rohaľ-Ilkiv, Boris - Neuschl, Tomáš: Comparison of a linear and nonlinear approach to engine misfires detection. In: Control Engineering Practice. - ISSN 0967-0661. - Vol. 10 (2002), s. 1141-1146
Cooperation: Oxford University, NTNU Trondheim, KUL Loeven
Photos:
Fig. 1: Autonomous mobile robotic system.

Fig. 2: Autonomous mobile robotic system
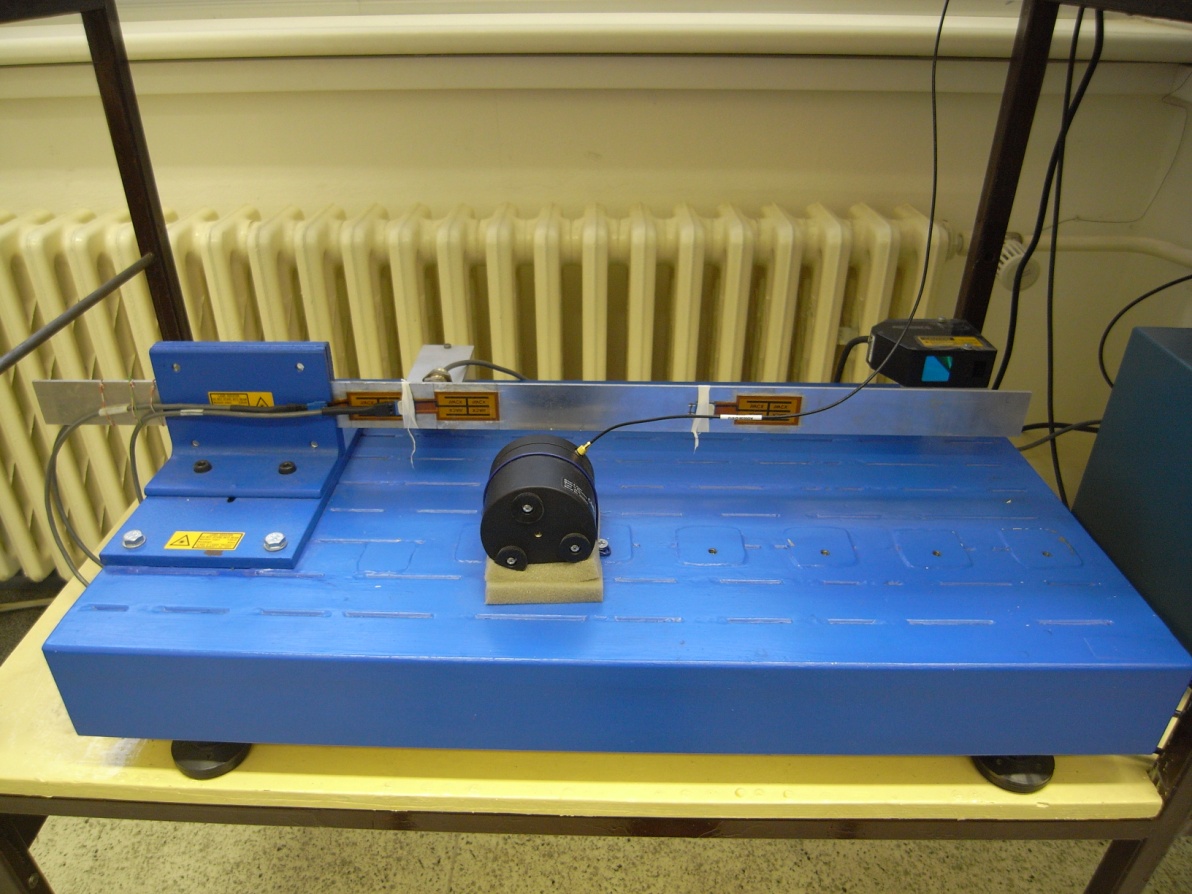
Fig. 3: Vibration control




