 Laboratórium automatického riadenia a mechatroniky
Laboratórium automatického riadenia a mechatroniky
Strojnícka fakulta
Katedra/ústav: Ústav automatizácie, merania a aplikovanej informatiky
Kontaktná osoba: prof. Ing. Boris Rohaľ-Ilkiv, CSc.
Kontakt: 0908 109 345
e-mail: boris.rohal-ilkiv@stuba.sk
Charakteristika
Laboratórium je svojím prístrojovým a programovým vybavením zamerané na oblasť výskumu, vývoja a experimentálneho overovania moderných metód riadenia, modelovania a identifikácie mechatronických a robotických systémov. Orientované je predovšetkým na tvorbu programového vybavenia pre adaptívne a prediktívne riadiace systémy, s priebežným odhadom stavu a parametrov riadených systémov. Dôraz je kladený na vývoj riadiacich algoritmov umožňujúcich zohľadňovať zadané obmedzenia na vstupné, stavové a výstupné veličiny riadeného systému resp. procesu. Laboratórium je tvorené súborom vývojových a demonštračných pracovísk pozostávajúcich z personálneho počítača vybaveného meracími kartami, z modulov elektronického prispôsobenia vstupno/výstupných signálov a z fyzikálneho laboratórneho modelu, ktorý v zmysle dynamických vlastností je ekvivalent skutočného riadeného systému, alebo objektu. V laboratóriu boli vyvinuté a skonštruované viaceré experimentálne zostavy ako je napríklad autonómny mobilný robotický systém, rotačné a lineárne kyvadlá, pendubot, zostava na aktívne tlmenie vibrácií a hluku, model inteligentnej budovy a iné. Takto koncipované pracoviská umožňujú experimentálne verifikovať stabilitu, konvergenciu a robustnosť výsledných algoritmov v aplikáciách reálneho času na vnorených riadiacich platformách.
Projekty
- „Adaptive and predictive control with physical constraints“. Projekt EU No. CP941174 PREDCON v rámci COPERNICUS Programme. Zodpovedný vedúci, doba riešenia 1995-1998.
- „Stable model based predictive control for constrained systems and processes“. Projekt of British-Slovak joint research collaboration programme between STU and Oxford Universit supported by British Council. Brit5/Slov. č.7995. Zodpovedný vedúci, doba riešenia 1999-2002.
- „Prediktívne riadenie mechatronických systémov s rýchlou dynamikou a obmedzeniami “ APVV projekt číslo APVV-0280-06. Zodpovedný riešiteľ, doba riešenia 2007-2009.
- „Efektívne prediktívne riadenie nelineárnych mechatronických systémov “ APVV projekt číslo LPP-0096-07. Zodpovedný riešiteľ, doba riešenia 2008-2011.
- "Metódy prediktívneho riadenia s modelom a spoločný odhadu stavu a parametrov pre rýchle nelineárne mechatronické systémy" APVV projekt číslo APVV-0090-10. Zodpovedný riešiteľ, doba riešenia 2011-2014.
- "Training in Embedded Predictive Control and Optimization" Projekt FP7-PEOPLE-2013-ITN. No. 607957. Spoluriešiteľ, doba riešenia 2014-2017.
Publikácie
- Polóni, Tomáš - Rohaľ-Ilkiv, Boris - Johansen, T.A.: Mass flow estimation with model bias correction for a turbo charged Diesel engine. In: Control Engineering Practice. - ISSN: 0967-0661. - Vol. 23, pp. 22-31 (2014)
- Polóni, Tomáš - Eielsen, A.A. - Rohaľ-Ilkiv, Boris - Johansen, T.A.: Adaptive Model Estimation of Vibration Motion for a Nanopositioner with Moving Horizon Optimized Extended Kalman Filter. In: Journal of Dynamic Systems Measurement and Control-Transactions of the ASME. - ISSN 0022-0434. - Vol. 135, No. 4 (2013)
- Takács, Gergely - Rohaľ-Ilkiv, Boris: Model Predictive Vibration Control: Efficient Constrained MPC Vibration Control for Lightly Damped Mechanical Structures. - 1st. ed. - London : Springer Verlag London, 2012. - 512 s. - ISBN 978-1-4471-2332-3
- Polóni, Tomáš - Rohaľ-Ilkiv, Boris - Alberer, Daniel - del Re, Luigi - Johansen, T. A.: Comparison of sensor configurations for mass flow estimation of turbocharged diesel engines. In: Lecture Notes in Control and Information Sciences. - ISSN 0170-8643. - Vol. 418: Identification for automotive systems. - London: Springer Verlag London, 2012. - ISBN 978-1-4471-2220-3, p. 303-326
- Polóni, Tomáš - Johansen, T. A. - Rohaľ-Ilkiv, Boris: Modeling of Air-Fuel Ratio Dynamics of Gasoline Combustion Engine with ARX Network. In: Journal of Dynamic Systems Measurement and Control-Transactions of the ASME. - ISSN 0022-0434. - Vol. 130, No. 6 (2008), s. 061009/1-061009/10
- Kouvaritakis, B. - Cannon, M. - Karas, Adrián - Rohaľ-Ilkiv, Boris - Belavý, Cyril: Asymmetric constraints with polytopic sets in MPC with application to coupled tanks system. In: International Journal of Robust and Nonlinear Control. - ISSN 1049-8923. - Vol. 14 (2004), s. 341-353
- Kouvaritakis, B. - Cannon, M. - Rohaľ-Ilkiv, Boris - Karas, Adrián - Belavý, Cyril: Constrained predictive control of linear distributed parameter systems. In: International Journal of Control. - ISSN 0020-7179. - Vol. 77 (2004), No. 10, s. 941-948
- Rohaľ-Ilkiv, Boris: A note calculation of polytopic-invariant feasible sets for linear continuous-time systems. In: Annual Reviews in Control. - ISSN 1367-5788. - Vol. 28 (2004), s. 59-64
- Rohaľ-Ilkiv, Boris: Continuous - Time Predictive Control: Spline Based Approach. - 1. vyd. - Bratislava: STU v Bratislave, 2003. - 122 s. - ISBN 80-227-1872-6
- Roháľová Ilkivová, Martina - Rohaľ-Ilkiv, Boris - Neuschl, Tomáš: Comparison of a linear and nonlinear approach to engine misfires detection. In: Control Engineering Practice. - ISSN 0967-0661. - Vol. 10 (2002), s. 1141-1146
Spolupráca: Oxford University, NTNU Trondheim, KUL Loeven
Fotografie
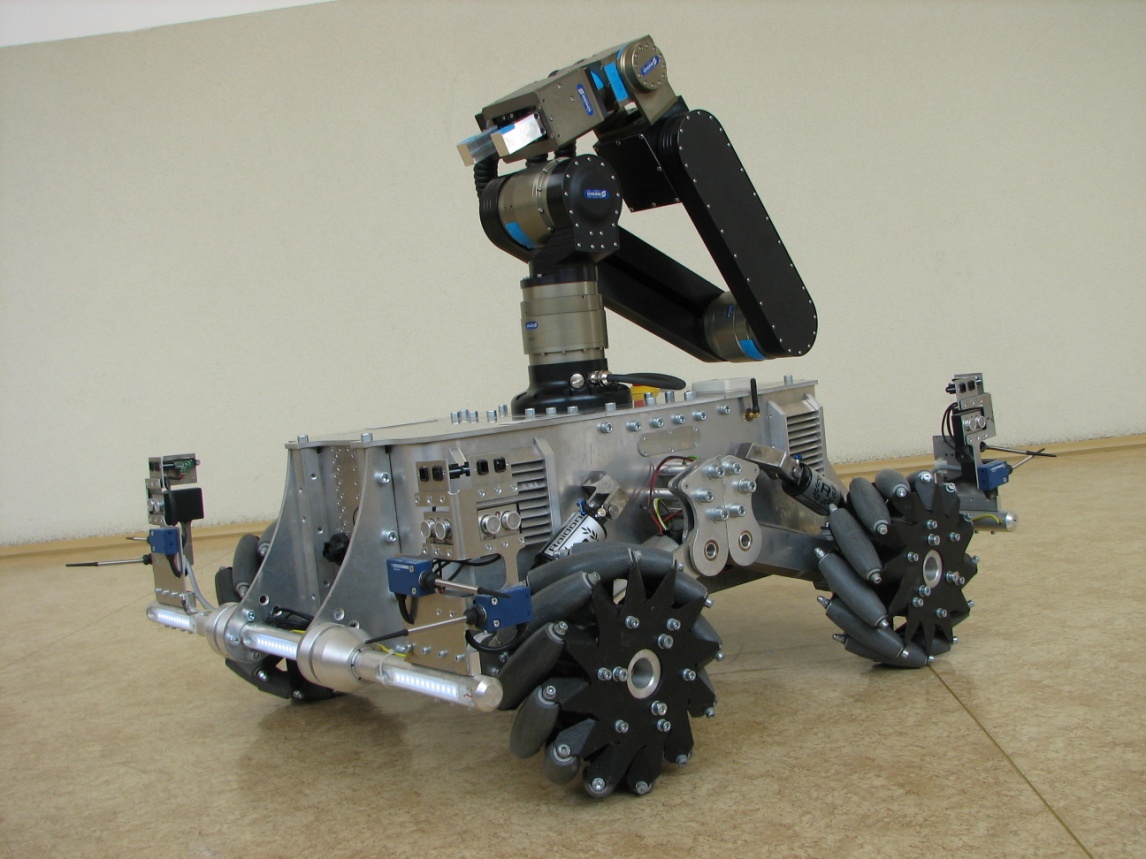
Obr. 1: Autonómny mobilný robotický systém

Obr. 2: Dvojramenný mechatronický systém „pendubot“
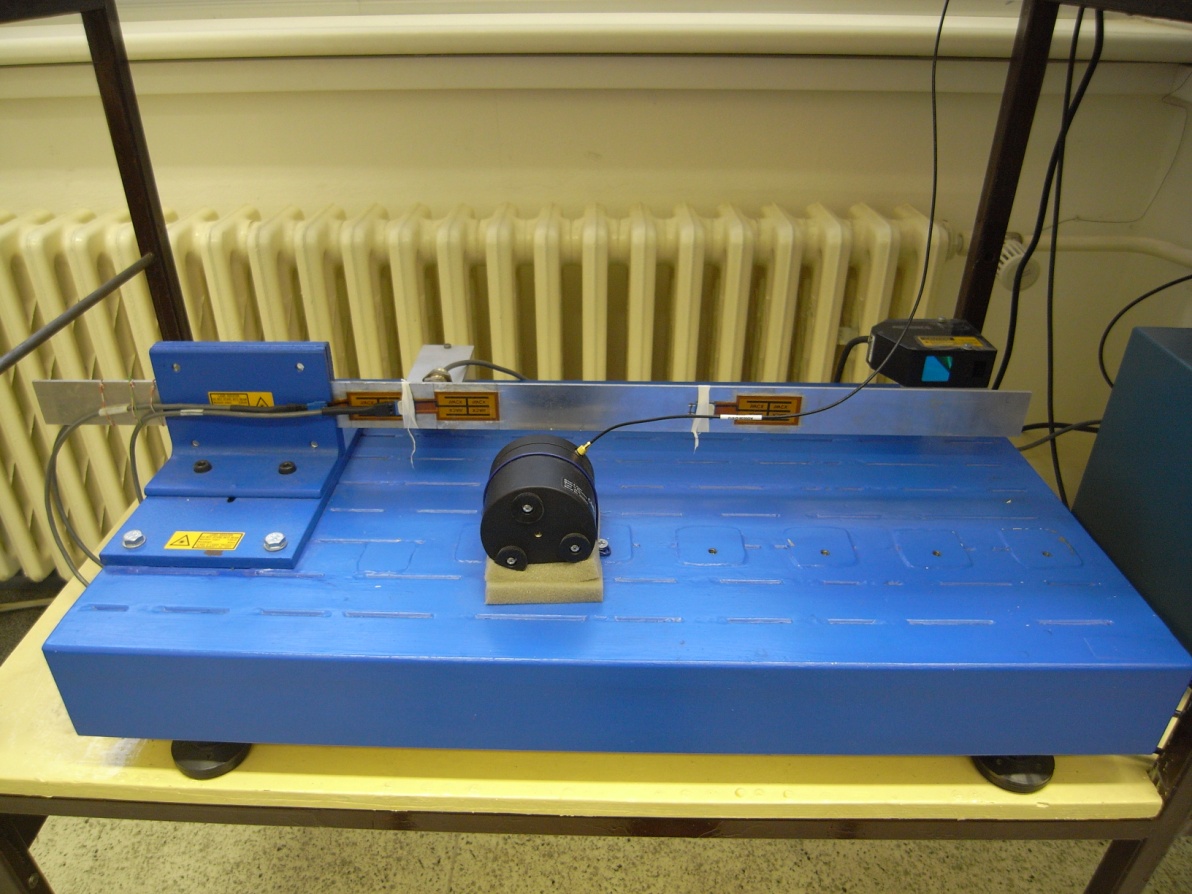
Obr. 3: Riadenie vibrácií