Centrum robotiky
Centrum robotiky
Fakulta elektrotechniky a informatiky STU
Katedra/ústav: Ústav robotiky a kybernetiky
Kontaktná osoba: prof. Ing. František Duchoň, PhD.
Kontakt: 0915 719 462
e-mail: frantisek.duchon@stuba.sk
web stránky: www.urk.fei.stuba.sk/
www.nacero.sk
Charakteristika:
Národné centrum robotiky je laboratórium zameriavajúce na výskum v oblasti mobilnej, servisnej a priemyselnej robotiky. Toto laboratórium je bohato vybavené:
- priemyselné roboty ABB 4600 a 120 spolu s vizuálnymi systémami a silovo-momentovým snímačom vo všetkých šiestich stupňoch voľnosti,
- priemyselný robot KUKA KR-6 Agilus,
- odľahčený robotický manipulátor LWA 4P 6KG 6DOF vybavený silovo-momentovým snímačom,
- priemyselný robot Mitsubishi RV-20FM-D s otvoreným riadiacim systémom,
- priemyselný robot Yaskawa Motoman UP-50N,
- prototyp servisného robota MRVK s robotickým ramenom,
- prototyp robota do vnútorného prostredia Black Metal,
- mobilný manipulátor KUKA YouBot vybavený RGB-D kamerou a laserovým diaľkomerom,
- dva kráčajúce roboty typu hexapod,
- dvojnohý kráčajúci robotom Bioloid GP typu biped,
- humanoidný robot NAO,
- prototyp robotickej guľe,
- lietajúcimi robotické systémy DJI F440 quadrocopter, DJI F550 hexacopter, DJI F450 quadrocopter, Yuneec Typhoon H Advance,
- a iné vývojové roboty – napr. robotický segway, 9 ks podvozkov iRobot Create, 5 ks podvozkov Kobuki doplnené o RPLIDAR a IMU jednotky.
Laboratórium je špecializované aj z hľadiska prístrojového vybavenia, napr. geodetický GNSS lokalizačný systém LEICA 1200+, silovo-momentový snímač OptoForce HEX-70-CE-2000N, IMU jednotky MEMS ADIS 16488BMLZ, ADIS 16350AMLZ, laserový skener pre zváranie M2-iLAN-2, viaceré štandardné laserové diaľkomery od spoločností Sick a Hokuyo, termovízna kamera TIM160, HDR kamera uEye, RGBD kamery - Kinect v1 a v2, Asus Xtion, RealSense a pod.
Z hľadiska výskumu je Národné centrum robotiky zamerané na lokalizáciu a navigáciu robotov, senzorické technológie, vizuálne systémy, HMI a riadenia pohybu s rôznymi riadiacimi štruktúrami.
Projekty:
|
Robotické pracovisko pre inteligentné zváranie maloobjemovej výroby (IZVAR) |
ITMS 2014 | 2019 -2022 |
| Algoritmus kolektívnej inteligencie: Interdisciplinárne štúdium swarmového správania netopierov | APVV-17-0116 | 2018 - 2022 |
| Kolaboratívny robot pre použitie v laboratóriu | APVV-17-0214 | 2018 - 2020 |
| Automatizovaná robotická montážna bunka ako prostriedok konceptu Industry 4.0 | APVV-16-0006 | 2017 - 2020 |
| Riadenie dynamických systémov za podmienok neurčitosti | 1/0475/16 | 2016 - 2019 |
| Metódy inteligentného riadenia bezpilotných lietajúcich prostriedkov pre inšpekciu v priemyselnom prostredí | 1/0752/17 | 2017 - 2019 |
| Výskum technologických uzlov CNC strojov na delenie materiálov energolúčovými technológiami | 0691/2015 |
2015 - 2018 |
| Automatické generovanie trajektórii pre roboticky manipulátor | 2018 | |
| Výskum novej generácie elektrónovolúčových komplexov určených na vákuové zváranie hliníkových a horčíkových zliatin | 2015-10871/33302 | 2015 - 2018 |
| Inovatívne metódy HRI pre riadenie robotov v reálnom prostredí | 1/0065/16 |
2016 - 2018 |
| Autonómny systém na 3D tlač vo vesmíre | 2017et005 |
2018 |
CC publikácie:
- BABINEC, Andrej - DUCHOŇ, František - DEKAN, Martin - PÁSZTÓ, Peter - KELEMEN, Michal. V FH*TDT (V FH* with Time Dependent Tree): A new laser rangefinder based obstacle avoidance method designed for environment with non-static obstacles. In Robotics and Autonomous Systems. Vol. 62 (2014), s. 1098-1115. ISSN 0921-8890. V databáze: CC: 000338405000002.
- BABINEC, Andrej - DUCHOŇ, František - DEKAN, Martin - MIKULOVÁ, Zuzana - JURIŠICA, Ladislav. Vector Field Histogram* with look-ahead tree extension dependent on time variable environment. In Transactions of the Institute of Measurement and Control. Vol. 40, Iss. 4 (2018), s. 1250-1264. ISSN 0142-3312. V databáze: CC: 000429971400018.
- DEKAN, Martin - DUCHOŇ, František - BABINEC, Andrej - HUBINSKÝ, Peter - KAJAN, Martin - SZABOVÁ, Martina. Versatile approach to probabilistic modeling of Hokuyo UTM-30LX. In IEEE Sensors Journal. Vol. 16, Iss. 6 (2016), s. 1814-1828. ISSN 1530-437X. V databáze: CC: 000370932500038.
- DEKAN, Martin - DUCHOŇ, František - BABINEC, Andrej - RODINA, Jozef - RAU, Dávid - MUSIČ, Josip. Moving obstacles detection based on laser range finder measurements. In International Journal of Advanced Robotic Systems. Vol. 15, iss. 1 (2018), Art. no. 1729881417748132 [18] s. ISSN 1729-8806. V databáze: CC: 000419779700001 ; SCOPUS: 2-s2.0-85041386677.
- DUCHOŇ, František - RODINA, Jozef - HUBINSKÝ, Peter - RAU, Dávid - KOSTROŠ, Juraj. Generalized dynamic model and control of ambiguous mono axial vehicle robot. In International Journal of Advanced Robotic Systems. Vol. 13, no. 5 (2016), [16] s. ISSN 1729-8806. V databáze: SCOPUS: 2-s2.0-84994047737 ; CC: 000403455300001.
- FICO, Tomáš - DUCHOŇ, František - DÚBRAVSKÝ, Jozef. Hardware and Software Realization of EDSD for Acupuncture Research and Practice. In IEEE Journal of Biomedical and Health Informatics. Vol. 18, No. 4 (2014), s. 1207-1213. ISSN 2168-2194.
- CHOVANCOVÁ, Anežka - FICO, Tomáš - HUBINSKÝ, Peter - DUCHOŇ, František. Comparison of various quaternion-based control methods applied to quadrotor with disturbance observer and position estimator. In Robotics and Autonomous Systems. Vol. 79, (2016), s. 87-98. ISSN 0921-8890. V databáze: SCOPUS: 2-s2.0-84958581863 ; CC: 000374358500007.
- JURIŠICA, Ladislav - DUCHOŇ, František - KAŠTAN, Dušan - BABINEC, Andrej. High Precision GNSS Guidance for Field Mobile Robots. In International Journal of Advanced Robotic Systems. Vol. 9 (2012), s.169-178. ISSN 1729-8806.
- KONIAR, Dušan - HARGAŠ, Libor - LONCOVÁ, Zuzana - DUCHOŇ, František - BEŇO, Peter. Machine vision application in animal trajectory tracking. In Computer Methods and Programs in Biomedicine. Vol. 127, (2016), s. 258-272. ISSN 0169-2607. V databáze: CC: 000372521500022.
- KONIAR, Dušan - HARGAŠ, Libor - LONCOVÁ, Zuzana - SIMONOVÁ, Anna - DUCHOŇ, František - BEŇO, Peter. Visual system-based object tracking using image segmentation for biomedical applications. In Electrical Engineering. Vol. 99, Iss. 4 (2017), s. 1349-1366. ISSN 0948-7921. V databáze: CC: 000415972700022 ; SCOPUS: 2-s2.0-85026909750.
- MIKULOVÁ, Zuzana - DUCHOŇ, František - DEKAN, Martin - BABINEC, Andrej. Localization of mobile robot using visual system. In International Journal of Advanced Robotic Systems. Vol. 14, iss. 5 (2017), [11] s. ISSN 1729-8806. V databáze: CC: 000414028000001.
- SAVKIV, Volodymyr - MYKHAILYSHYN, Roman - DUCHOŇ, František - FENDO, Olena. Justification of design and parameters of Bernoulli–vacuum gripping device. In International Journal of Advanced Robotic Systems. Vol. 14, iss. 6 (2017), Art. no. 1729881417741740 [10] s. ISSN 1729-8806. V databáze: CC: 000415951400001.
- SAVKIV, Volodymyr - MYKHAILYSHYN, Roman - DUCHOŇ, František - MIKHALISHIN, Mykhailo. Modeling of Bernoulli gripping device orientation when manipulating objects along the arc. In International Journal of Advanced Robotic Systems. Vol. 15, Iss. 2 (2018), s. 1-12. ISSN 1729-8806. V databáze: SCOPUS: 000427549600001 ; CC: 000427549600001.
- SAVKIV, Volodymyr - MYKHAILYSHYN, Roman - DUCHOŇ, František. Gasdynamic analysis of the Bernoulli grippers interaction with the surface of flat objects with displacement of the center of mass. In Vacuum. Vol. 159, (2019), s. 524-533. ISSN 0042-207X. V databáze: CC: 000454964400071 ; SCOPUS: 2-s2.0-85056449930.
- TÖLGYESSY, Michal - DEKAN, Martin - DUCHOŇ, František - RODINA, Jozef - HUBINSKÝ, Peter - CHOVANEC, Ľuboš. Foundations of visual linear human-robot interaction via pointing gesture navigation. In International Journal of Social Robotics. Vol. 9, Iss. 4 (2017), s. 509-523. ISSN 1875-4791. V databáze: CC: 000408405800005.
Spolupráca s praxou:
Matador Group, Photoneo, s.r.o., Humusoft SK, Volkswagen Slovakia s.r.o., Microstep s.r.o., Aerobtec, s.r.o., SCHUNK Intec, s.r.o., Symartech s.r.o. Horská záchranná služba, Sensodrive GmbH, e-Technology, s.r.o.
FA STU (spolupráca v oblasti dizajnu robotov), Ústav informatiky SAV Bratislava (hardvérové a softvérové riešenia pre riadenie pohybu mobilných robotov), InterOcean Metal Szczecin Poľsko (príprava technológií pre podmorskú ťažbu minerálov), VÚT Brno (spolupráca v rámci Industrie 4.0), Technická univerzita v Košiciach, Žilinská univerzita v Žiline, Ternopil Ivan Puľuj National Technical University v Ternopile, University of Split a Graz University of Technology.
Fotografie:
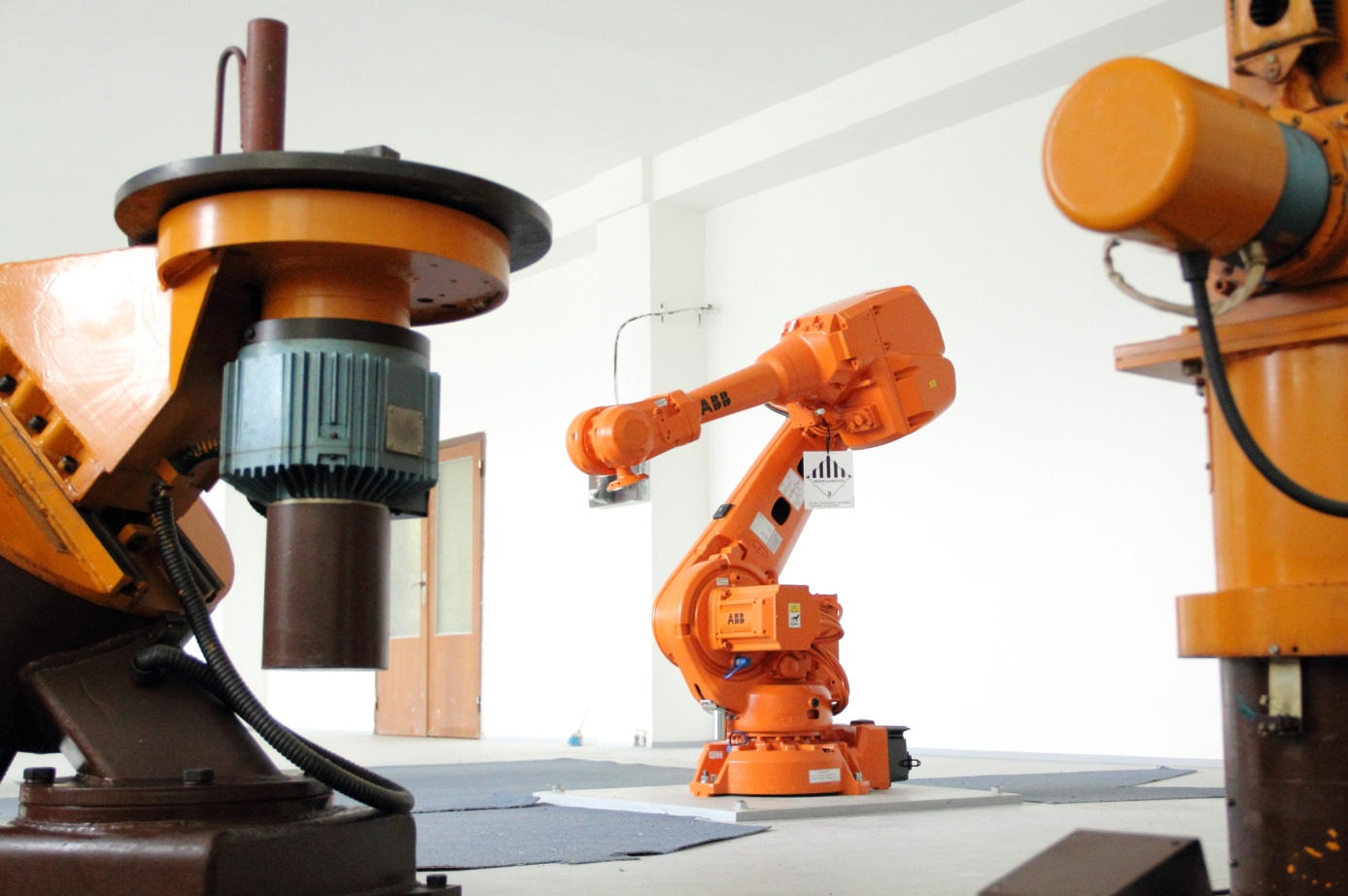
Priestory Centra robotiky vybavené robotickými manipulátormi a polohovadlami.

Prototyp slovenského servisného robota MRVK s robotickým ramenom.

Robotická guľa, v pozadí robot typu Segway (prototyp a realizácia).